Официальное название


Разработка колесных и подводных мобильных робототехнических систем.
Подразделение
Кафедра «Мехатронные системы», лаборатория «Мобильные системы».
Авторский коллектив
Караваев Ю.Л., к.т.н. (http://lab.ics.org.ru; e-mail: borisov@rcd.ru).
Назначение
Разработка систем управления и программного обеспечения мобильных роботов.
Область применения
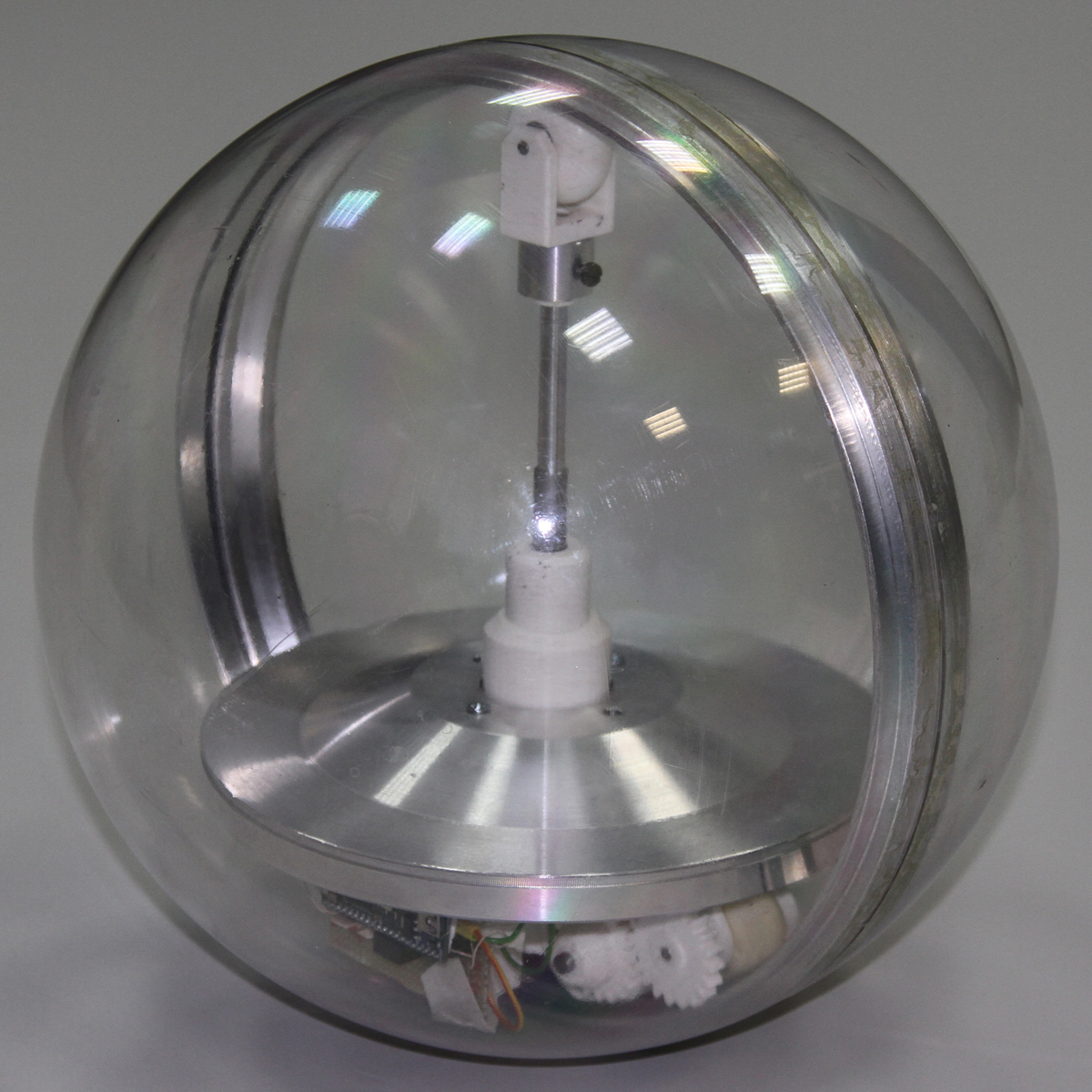
Сферические роботы: помещения с ограниченным пространством для движения (складские и производственные помещения, многоуровневые парковки).
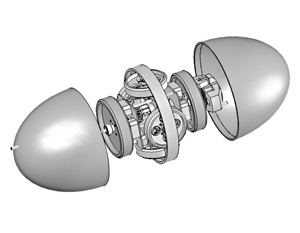
Безвинтовой подводный робот: управляемое движение в произвольном направлении в жидкости посредством узла маховиков, а также регулирования глубины его погружения за счет модулей плавучести.


Принцип действия
Всокоманевренные роботы:
- Колеса выполнены неповоротными, но при этом оснащаются наклонными роликами.
- Индивидуальное оснащение каждого из колес своим приводом дает возможность задавать самые разнообразные сочетания направлений и скоростей вращения колес, что обеспечивает движение по любой траектории.
Безвинтовой подводный робот содержит корпус, выполненный в виде эллипсоида, состоящего из двух половин, герметично соединенных друг с другом в экваториальной плоскости с помощью дискообразной опорной перегородки, содержащей четыре прямоугольных окна. В опорной перегородке установлен узел маховиков. Дополнительно робот снабжен двумя однотипными модулями плавучести, закрепленными в вершинах каждой из половин корпуса.
Технические характеристики
Высокая маневренность (могут перемещаться в любом направлении без дополнительных маневров).
Герметичность оболочки позволяет работать в агрессивных условиях окружающей среды и обеспечивает защиту внутренних механизмов и элементов систем управления.
Алгоритмы управления, построенные на основании результатов анализа динамики, обеспечивают высокую управляемость сферороботами.